Al tratar de resolver un sistema de ecuaciones uno se puede encontrar con que hay muchas formas diferentes de hacerlo como el método de Gauss, regla de Cramer o el teorema Rouche-Frobenius.
Esto podría generar la pregunta: ¿Cuál método es el mejor?
A continuación haremos una comparación entre estos métodos resolviendo diferentes sistemas de ecuaciones y discutiremos sobre las ventajas y desventajas de usar cada uno de los métodos mencionados.










Si un sistema de  ecuaciones y
ecuaciones y  incógnitas tiene todos los términos independientes nulos se dice que es homogéneo.
incógnitas tiene todos los términos independientes nulos se dice que es homogéneo.
Admiten la solución trivial:

La condición necesaria y suficiente para que un sistema homogéneo tenga soluciones distintas de la trivial es que el rango de la matriz de los coeficientes sea menor que el nº de incógnitas, o dicho de otra forma, que el determinante de la matriz de los coeficientes sea nulo.
Esto solo nos dice que el sistema tiene una solución diferente de la trivial, pero claramente no nos dice cual es. Por lo que para calcularla podemos hacer uso de los métodos mencionados.
Ejemplo
Resolver el siguiente sistema de ecuaciones:
Solución con el método de Gauss-Jordan
1Formar una matriz de los coeficientes y los términos independientes.
Lo primero que tenemos que hacer es formar una matriz con los coeficientes y los términos independientes (números del lado derecho del signo de igualdad de las ecuaciones) de las ecuaciones de la siguiente manera:
 ,

2Usar un poco de álgebra para hacer la eliminación gaussiana.
Ahora procedemos a hacer las operaciones para encontrar la solución del sistema, por lo que hacemos:



De esto obtenemos las ecuciones:

3Reescribir las variables.
En este caso tomamos  , tenemos que:
, tenemos que:  y
y  .
.
Esto para tener todas las variables en términos de una sola.
Lo que indica que el sistema tiene infinitas soluciones.
Solución con la regla de Cramer
1Formar la matriz de los coeficientes y calcular el determinante.
2Debido a que el determinante de la matriz de los coeficientes es  , no podemos hacer uso de la regla de cramer. Esto puede indicar que el sistema no tiene solución o tiene infinitas soluciones.
, no podemos hacer uso de la regla de cramer. Esto puede indicar que el sistema no tiene solución o tiene infinitas soluciones.
Solución con el teorema Rouche-Frobenius
1Formar la matriz de los coeficientes.
2Calcular el rango de la matriz de los coeficientes.
En este caso el rango de la matriz es:

3Formar la matriz ampliada.
Ahora agregamos los términos independientes del sistema de ecuaciones (números del lado derecho del signo de igualdad de las ecuaciones) a la matriz, por lo que formamos la matriz ampliada:
4Calcular el rango de la matriz ampliada.
En este caso el rango de la matriz ampliada es:

5Aplicamos el teorema de Rouché.
 Sistema Compatible.
Sistema Compatible.  Sistema Compatible Determinado.
Sistema Compatible Determinado. Sistema Compatible Indeterminado.
Sistema Compatible Indeterminado.
 Sistema Incompatible.
Sistema Incompatible.
Donde representa el número de variables.
Como los rangos de ambas matrices coinciden, entonces el sistema es compatible, y además ya que el rango es menor al número de incógnitas entonces el sistema es compatible indeterminado, lo que indica que tiene infinitas soluciones.
Sistemas no homogéneos
¿Necesitas un profesor de mates?
Se dice que un sistema de ecuaciones es no homogéneo, cuando cada una de las ecuaciones involucradas en el sistema están igualadas a un número diferente de cero.
Ejemplo
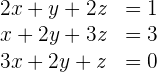
Resolver el siguiente sistema de ecuaciones:
Solución con el método de Gauss-Jordan
1Formar la matriz de los coeficientes y los términos independientes.
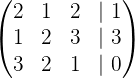
Lo primero que tenemos que hacer es formar una matriz con los coeficientes y los términos independientes (números del lado derecho del signo de igualdad de las ecuaciones) de las ecuaciones de la siguiente manera:
2Usar un poco de álgebra para hacer la eliminación gaussiana.
Antes de comenzar con a realizar las operaciones, cambiaremos la posición de las filas de la matriz de la siguiente manera para facilitar la resolución.
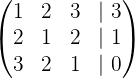
 
Ahora procedemos a hacer las operaciones para encontrar la solución del sistema, por lo que hacemos:




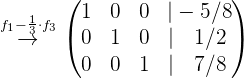
Lo que nos indica que la solución del sistema es:

Solución con la regla de Cramer
1Formar la matriz de los coeficientes y calcular el determinante.

2Como el determinante es distinto de 0, la matriz es regular y el sistema tiene una única solución (sistema compatible determinado).
3Continuar con el procedimiento para resolver el sistema.
Ahora reemplazamos la primera columna de la matriz de los coeficientes por una columna formada por los términos independientes (números del lado derecho del signo de igualdad de las ecuaciones) y calculamos el determinante.
Ahora el valor de la variable  esta dado por:
esta dado por:
Si hacemos algo similar a esto podemos encontrar el valor de las variables restantes, cambiando la segunda columna de la matriz de coeficientes por la columna de los términos independientes y calculando su determinante, encontramos el valor de  de forma similar al de , esto es lo mismo para la variable
de forma similar al de , esto es lo mismo para la variable  pero cambiando la tercera columna. Si hacemos los cálculos obtenemos que:
pero cambiando la tercera columna. Si hacemos los cálculos obtenemos que:
Solución con el teorema Rouche-Frobenius
1Formar la matriz de los coeficientes
 
2Calcular el rango de la matriz de los coeficientes.
En este caso el rango de la matriz es:
3Formar la matriz ampliada.
Ahora agregamos los términos independientes del sistema de ecuaciones (números del lado derecho del signo de igualdad de las ecuaciones) a la matriz, por lo que formamos la matriz ampliada:
4Calcular el rango de la matriz ampliada.
En este caso el rango de la matriz ampliada es:

5Aplicamos el teorema de Rouché.
- Sistema Compatible.
- Sistema Compatible Determinado.
- Sistema Compatible Indeterminado.
- Sistema Incompatible.
Donde representa el número de variables.
Como los rangos de ambas matrices coinciden, entonces el sistema es compatible, y además ya que el rango es igual al número de incógnitas entonces el sistema es compatible determinado, lo que indica que tiene una única solución.
Sistemas de ecuaciones con parámetros
En esta sección revisaremos como resolver sistemas de ecuaciones con parámetros con los métodos que hemos visto hasta ahora.
Ejemplo
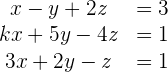
Resolver el siguiente sistema de ecuaciones:
Solución con el método de Gauss-Jordan
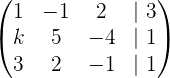
1Formar una matriz de los coeficientes y los términos independientes.
Lo primero que tenemos que hacer es formar una matriz con los coeficientes y los términos independientes (números del lado derecho del signo de igualdad de las ecuaciones) de las ecuaciones de la siguiente manera:
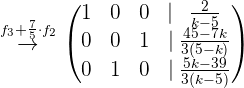
2Usar un poco de álgebra para hacer la eliminación gaussiana.
Ahora procedemos a hacer las operaciones para encontrar la solución del sistema




Rápidamente notamos que si  , entonces no existirían la solución del sistema de ecuaciones. Por lo que suponemos que
, entonces no existirían la solución del sistema de ecuaciones. Por lo que suponemos que  .
.
Por lo que tenemos que la solución del sistema es:

Solución con la regla de Cramer
1Formar la matriz de los coeficientes y calcular el determinante.
2Notamos que si entonces el determinante es y significaría que no podemos utilizar la regla de Cramer. Por lo que vamos a suponer que .
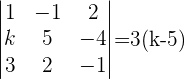
3Sustituimos la primera columna por columna de los términos independientes y calculamos el determinante.

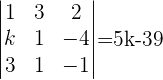
4Sustituimos la segunda columna por columna de los términos independientes y calculamos el determinante.
5Sustituimos la tercera columna por columna de los términos independientes y calculamos el determinante.
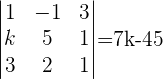
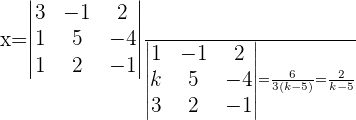
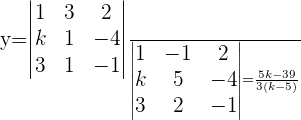
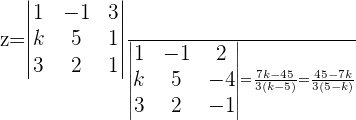
5Calculamos el valor de las variables , y .
Por la regla de cramer sabemos que:
Solución con el teorema Rouche-Frobenius
1Formar la matriz de los coeficientes.
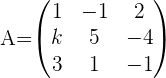
2Calcular el rango de la matriz de los coeficientes.
En este caso el rango de la matriz depende del determinante de la matriz el cual es:

Notamos que si entonces el determinante es  , por lo que el rango de la matriz sería .
, por lo que el rango de la matriz sería .
Ahora si entonces el determinante es  , por lo que el rango en este caso es
, por lo que el rango en este caso es
3Formar la matriz ampliada.
Ahora agregamos los términos independientes del sistema de ecuaciones (números del lado derecho del signo de igualdad de las ecuaciones) a la matriz, por lo que formamos la matriz ampliada:

4Calcular el rango de la matriz ampliada.
En este caso el rango de la matriz ampliada es:
- Sistema Compatible.
- Sistema Compatible Determinado.
- Sistema Compatible Indeterminado.
- Sistema Incompatible.
Donde representa el número de variables.
Si , entonces el rango de las matrices es diferente, por lo que tenemos un sistema incompatible.
Si entonces los rangos de ambas matrices coinciden, entonces el sistema es compatible, y además ya que el rango es igual al número de incógnitas entonces el sistema es compatible determinado, lo que indica que tiene una única solución.
| Método de solución. | Ventajas | desventajas |
|---|---|---|
| Método de Gauss-Jordan | Es un método simple, fácil de aprender y recordar, además con él podemos ver que forman tienen las soluciones de los sistemas compatibles indeterminados. | No podemos conocer el tipo de sistema que estamos resolviendo hasta llegar prácticamente al final de las operaciones. |
| Regla de Cramer | Con este método podemos saber si el sistema a resolver tiene una única solución o no con sólo calcular el determinante de la matriz de coeficientes. | Con este método solo podemos resolver sistemas compatibles determinados, y no podemos ver que forma tienen las soluciones de sistemas compatibles indeterminados, o si el sistema es incompatible. |
| Teorema Rouche-Frobenius | Con sólo calcular el rango de dos matrices (la matriz de coeficientes y la matriz ampliada) podemos saber que tipo de sistema estamos resolviendo (compatible indeterminado, compatible determinado, incompatible). | No podemos calcular las soluciones (en caso de que existan) solo usando este método, para encontrarlas debemos hacer uso de otros métodos (regla de Cramer y método Gauss-Jordan). |
Resumir con IA:
¿Te ha gustado este artículo? ¡Califícalo!



Apuntes es una plataforma dirigida al estudio y la práctica de las matemáticas a través de la teoría y ejercicios interactivos que ponemos a vuestra disposición. Esta información está disponible para todo aquel/aquella que quiera profundizar en el aprendizaje de esta ciencia. Será un placer ayudaros en caso de que tengáis dudas frente algún problema, sin embargo, no realizamos un ejercicio que nos presentéis de 0 sin que hayáis si quiera intentado resolverlo. Ánimo, todo esfuerzo tiene su recompensa.
Resultado de este ejercicios de sistemas de Gauss con matrices:x+y+z=3
2x+4y+z=4
3x-y+z=1
Me podrían ayudar a resolverlo
Si tengo tres rectas donde dos se superponen (hasta acá el sistema es compatible indeterminado), pero una tercer recta las cruza, es sistema se convierte es compatible determinado por haber un punto de intersección entre las tres rectas o continúa siendo compatible indeterminado por las infinitas soluciones de dos de las tres rectas?
Hola como la tercera recta intercepta a las otras dos que están superpuestas, lo hace en un solo punto, entonces solo hay una sola solución que corresponde a las tres rectas, pues para que hubiera una infinidad de puntos de respuesta las tres rectas tendrían que ser superpuestas.
en la parte del inicio no es necesario multiplicar, es mas rapido directamente si se intenta sacar el x ya que los 4y ya son capases de eliminarse entre si
Hola gracias por tu aportación lo vamos a tomar en cuenta, podrías darnos más detalles para mejorar la explicación.
El ejercicio 8 esta mal, y es 444/113, no es negativo.
Una disculpa ya se corrigió.
Una disculpa por el error, ya se corrigió.
Me encanta su contenido, realmente me ayuda pero realmente me ayudaría incluso más si dieran un poco más de referencias para citar el documento, fecha, marta ¿Qué? Bueno, ya saben lo necesario para crear APA
¡Hola Cindy! 👋 Desde Superprof nos alegra que el contenido te sea útil. 😊 Para citar el artículo en formato APA, puedes referenciarlo así:
«Superprof. Ejercicios del método de Gauss II. [En línea] Disponible en: [URL del artículo].»
Por privacidad, no podemos dar datos personales del autor ni fecha exacta de publicación, pero esta referencia permite que tu cita sea válida. 📚✨