









Posiciones relativas de tres planos y matriz de coeficientes
Dados los planos:
Y sean:
 rango de la matriz de los coeficientes.
rango de la matriz de los coeficientes.
 rango de la matriz ampliada.
rango de la matriz ampliada.
Las posiciones relativas de los tres planos vienen dadas por la siguiente tabla:
 |  | Posición | |||||||
|---|---|---|---|---|---|---|---|---|---|
 | | 1. Planos secantes en un punto | |||||||
 | |
|
| ||||||
| |
|
| ||||||
 | |
|
| ||||||
| | 5. Planos coincidentes. |

¿Buscas clases de matematicas a domicilio? ¡Están en Superprof!
Planos secantes en un punto
Si  entonces los planos son secantes entre si y se cortan en un punto. Esto quiere decir que el sistema de ecuaciones formado por los tres planos es compatible determinado
entonces los planos son secantes entre si y se cortan en un punto. Esto quiere decir que el sistema de ecuaciones formado por los tres planos es compatible determinado
Si  y
y  entonces se tienen dos posibilidades para la intersección de los tres planos
entonces se tienen dos posibilidades para la intersección de los tres planos
Planos secantes dos a dos
Si y puede darse el cado que los planos se intersectan dos a dos formando una superficie primática. En este caso, el sistema de ecuaciones formado por los tres planos es incompatible
Dos planos paralelos y el tercero secante
Si y puede darse el caso de que dos planos sean paralelos y el tercero sea secante a los planos paralelos. En este caso, el sistema de ecuaciones formado por los tres planos es incompatible y dos filas de la matriz de los coeficientes son proporcionales.
Si  entonces se tienen dos posibilidades para la intersección de los tres planos
entonces se tienen dos posibilidades para la intersección de los tres planos
Planos secantes y distintos
Si  puede darse el caso de que los tres planos sean secantes y distintos pero los tres se intersecten en una misma recta. En este caso, el sistema de ecuaciones formado por los tres planos es compatible indeterminado.
puede darse el caso de que los tres planos sean secantes y distintos pero los tres se intersecten en una misma recta. En este caso, el sistema de ecuaciones formado por los tres planos es compatible indeterminado.
Dos planos coincidentes y uno secante
Si puede darse el caso de que dos planos. En este caso, el sistema de ecuaciones formado por los tres planos es compatible indeterminado y dos filas de la matriz ampliada son proporcionales.

Si  y
y  entonces se tienen dos posibilidades para la intersección de los tres planos
entonces se tienen dos posibilidades para la intersección de los tres planos
Planos paralelos y distintos dos a dos
Si y puede darse el caso de que los tres planos sean paralelos y distintos dos a dos. En este caso, el sistema de ecuaciones formado por los tres planos es incompatible.

Planos paralelos y dos coincidentes
Si y puede darse el caso de que dos planos coincidan y sean paralelos al tercero. En este caso, el sistema de ecuaciones formado por los tres planos es incompatible y dos filas de la matriz ampliada son proporcionales.

Planos coincidentes
Si  entonces los tres planos coinciden entre si. En este caso, el sistema de ecuaciones formado por los tres planos es compatible indeteminado.
entonces los tres planos coinciden entre si. En este caso, el sistema de ecuaciones formado por los tres planos es compatible indeteminado.
Ejemplos resuletos de planos
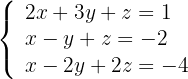
Hallar la posición relativa de los planos:
1
1Escribimos el sistema de ecuaciones

2Calculamos el rango de la matriz de coeficientes 

para ello calculamos el determinante de

Calculamos el determinante de la submatriz 
Así,
3Calculamos el rango de la matriz de coeficientes extendida 
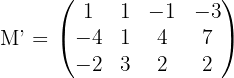
para ello calculamos el determinante de la submatriz

Así, .
Como los planos no son paralelos entre si, y concluimos que los tres planos son secantes dos a dos y forman una superficie prismática
2
1Escribimos el sistema de ecuaciones

2Calculamos el rango de la matriz de coeficientes

para ello calculamos el determinante de

Así,
3Calculamos el rango de la matriz de coeficientes extendida
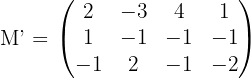
para ello calculamos el determinante de la submatriz la cual sabemos que es distinto de cero. Así, .
De esta forma se concluye que los tres planos se cortan en un punto
3
1Escribimos el sistema de ecuaciones
2Calculamos el rango de la matriz de coeficientes
para ello calculamos el determinante de

Calculamos el determinante de la submatriz 

Así,
3Calculamos el rango de la matriz de coeficientes extendida
como la segunda y tercera fila son múltiplos entre si, cualquier submatriz de de tres por tres tiene determinante cero. Por ello calculamos el determinante de la submatriz
Así,
De esta forma se concluye que el segundo y tercer plano son coincidentes y el primero es secante a ellos.
4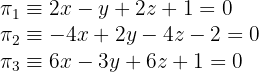
1Escribimos el sistema de ecuaciones

2Calculamos el rango de la matriz de coeficientes

como las tres filas son múltiplos entres si, el determinante de esta matriz y la de todas sus submatrices de tamaño 2 es cero ello calculamos el determinante de
Así,
3Calculamos el rango de la matriz de coeficientes extendida

como la primera y segunda fila son múltiplos entre si, cualquier submatriz de de tres por tres tiene determinante cero. Por ello calculamos el determinante de la submatriz

Así,
De esta forma se concluye que el primer y segundo plano son coincidentes y el tercero es paralelo a ellos.
Resumir con IA:
¿Te ha gustado este artículo? ¡Califícalo!



Apuntes es una plataforma dirigida al estudio y la práctica de las matemáticas a través de la teoría y ejercicios interactivos que ponemos a vuestra disposición. Esta información está disponible para todo aquel/aquella que quiera profundizar en el aprendizaje de esta ciencia. Será un placer ayudaros en caso de que tengáis dudas frente algún problema, sin embargo, no realizamos un ejercicio que nos presentéis de 0 sin que hayáis si quiera intentado resolverlo. Ánimo, todo esfuerzo tiene su recompensa.
Les felicito por su pedagogica web.
Podrian indicarme cual es la formula de las coordenadas del pie de una perpendicular por un punto (X1,Y1) a una recta Ax+By+c=0
Serian tan amables de enviarme dos formulas:
1) Formula de la pendiente de la bisectriz de 45º relacionada con las pendientes de los lados del angulo de 90º.
2) Formulas de las coordenadas del punto/pie de una perpendicular que pasa por el punto P(x0,y0) y una recta Ax+By+c=0.
Gracias de antemano.
M.Angel
En los ejercicios 7 y 8, trazar las rectas que pasan por el punto dado con la pendiente indicada. Dibujar en un mismo sistema de coordenadas.
Hola tu indicación es muy buena, vamos a ir mejorando para un mejor entendimiento.
Me puede ayudar con este problema
la pendiente de una recta que pasa por el punto A(3, 2) es igual a 3/4. situar dos puntos sobre esta recta que disten 5 unidades de A.
con su gráfica mas
Alguien me puede ayudar por favor necesito dar un examen para repasar y no me salen las respuestas
Hola con gusto te ayudamos, podrías mencionar específicamente con cual ejercicio podemos darte una mejor explicación.
Determinar las ecuaciones parametricas del plano x-2y+z-1=0
Hola, me sirvio mucho, con que informacion podria ponerlos como refernecia en mi proyecto?
Hola que bueno que la pagina te ayudo, podrías poner como pagina de internet «Materíal didactico-Superprof».